
 Homepage
Homepage
🎓 Education Background
 HKUST(GZ), PhD
HKUST(GZ), PhD
2025 – Present
 SUSTech, MSc
SUSTech, MSc
2021 – 2024
 SDU, BSc
SDU, BSc
2017 – 2021
🔬 Research Interests
Embodied AI: Vision-Language-Action Model, World-Action Model, Robotic Foundation Model, Legged Robot Control |
Autonomous Driving: Vision-LiDAR Fusion, 3D Perception, Navigation
📚 Selected Research & Publications
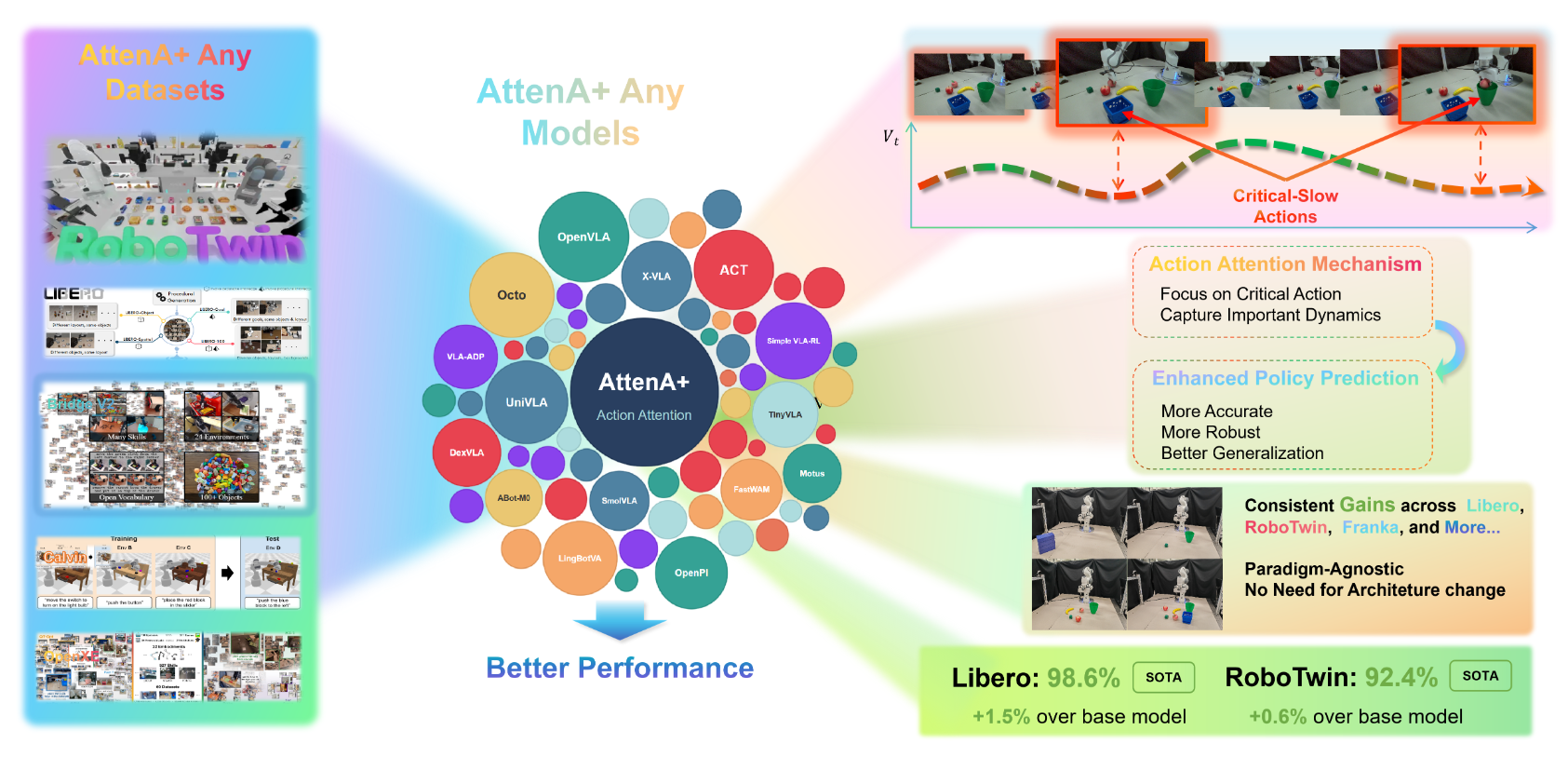
NeurIPS 2026 UR | First Author | arXiv
AttenA+: Rectifying Action Inequality in Robotic Foundation Models
Led research to mitigate action distribution imbalance in VLA robot foundation models. Proposed attention-driven rectification for balanced action space, boosting generalization and real-world deployment on legged/humanoid robots.
TMECH 2025 UR | First Author | arXiv
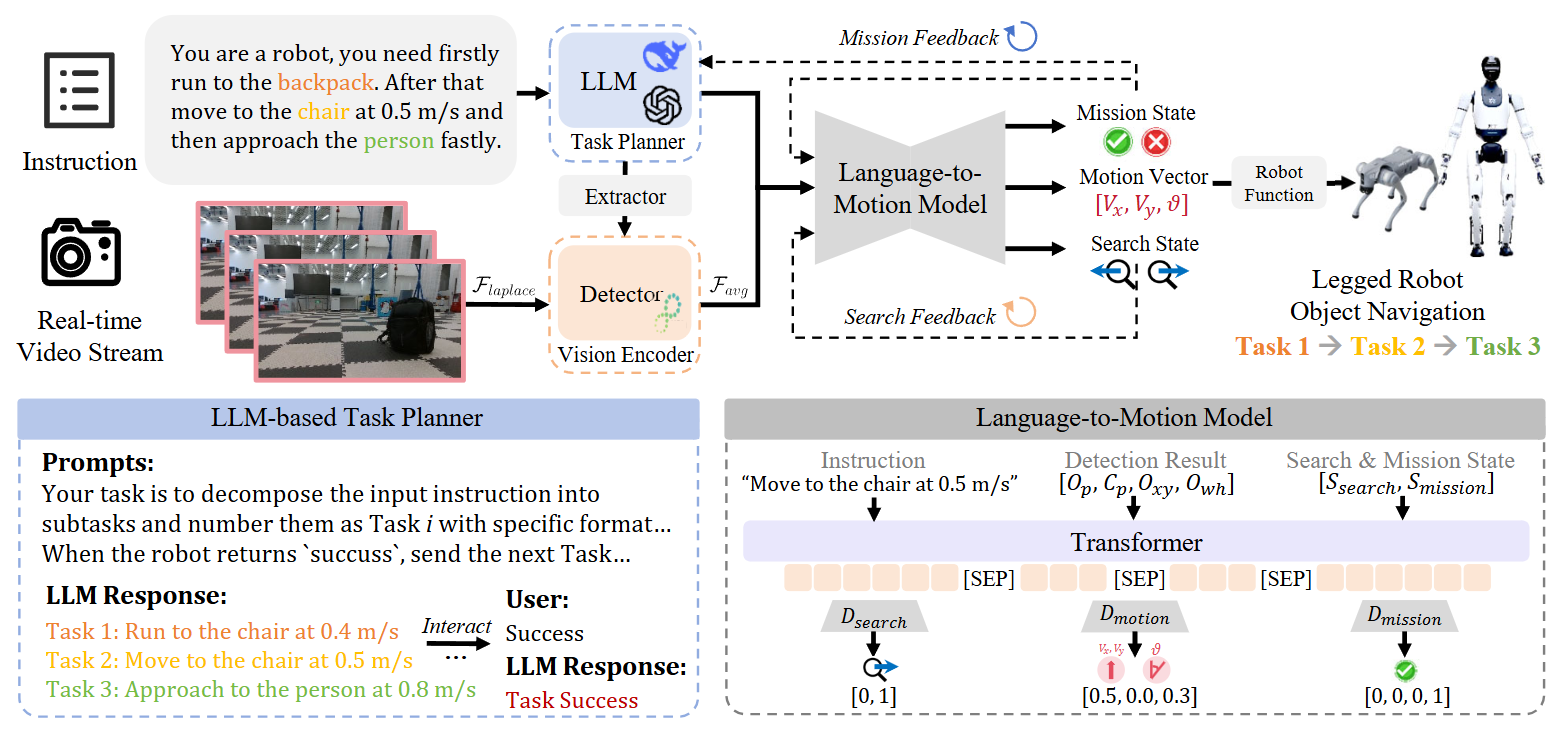
LOVON: Legged Open-Vocabulary Object Navigator
Led the first open-vocabulary navigation framework tailored for legged robots. Fused V-L reasoning and locomotion to realize zero-finetune target navigation across complex open environments.
ICRA 2025 | Co-First Author | arXiv
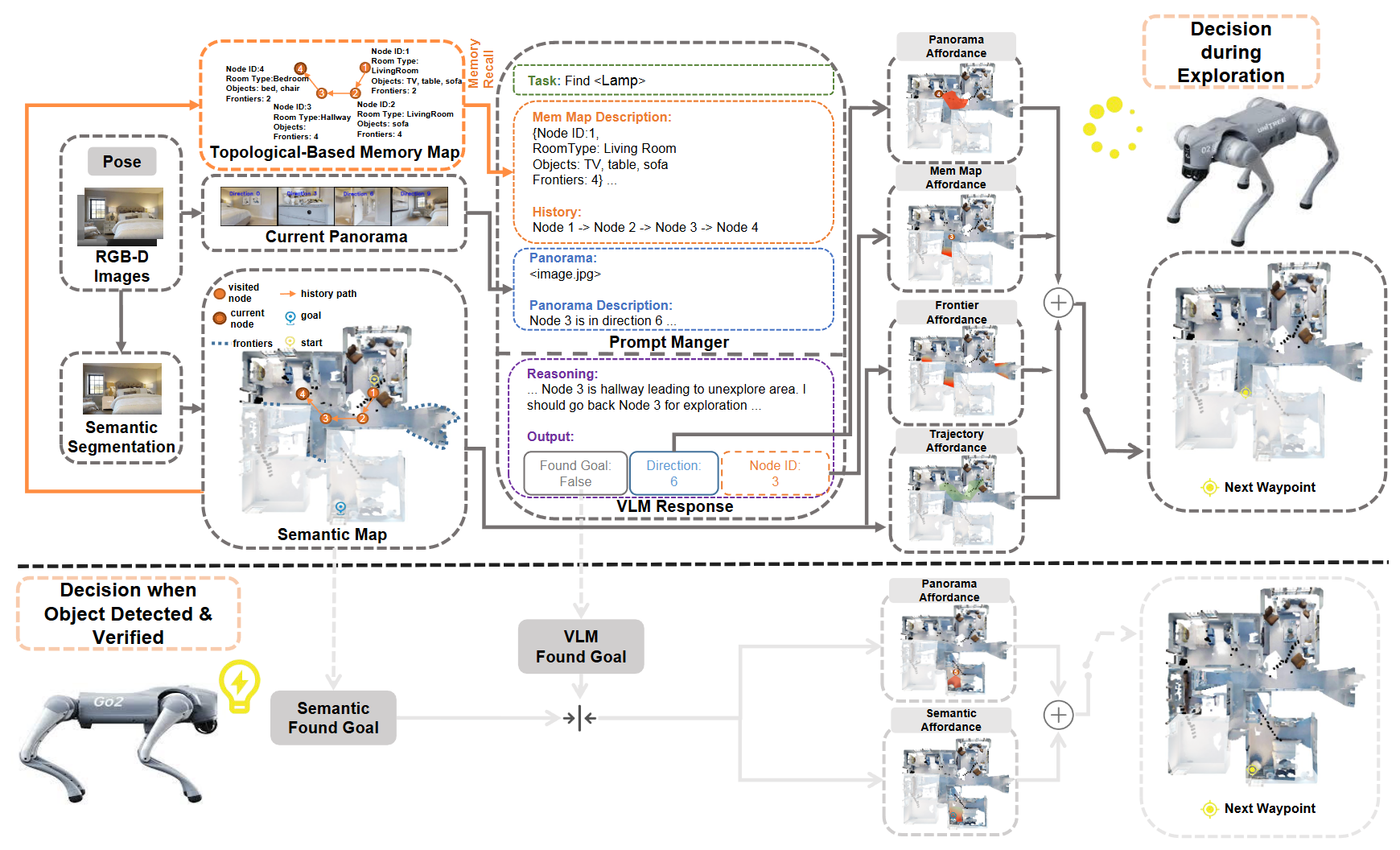
TopoNav: Topological Graphs as a Key Enabler for Advanced Object Navigation
Proposed a topological graph enhanced navigation paradigm. Abstracted environmental spatial structure into topological nodes, significantly improving long-horizon reasoning, exploration efficiency and navigation robustness for mobile robots.
ECCV 2026 UR | First Author | arXiv
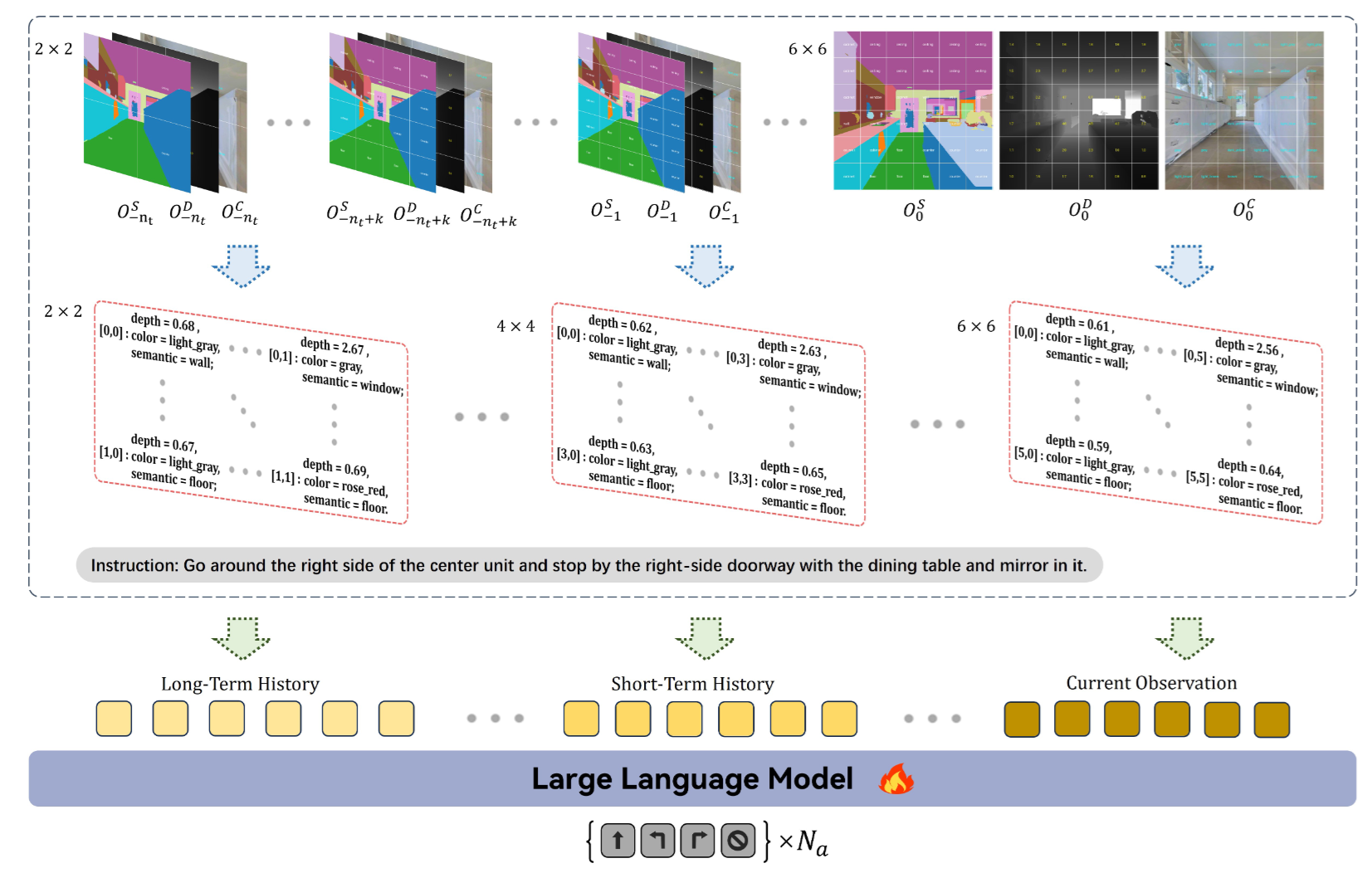
Structured Observation Language for Efficient and Generalizable Vision-Language Navigation
Proposed structured observation language for VLN to mitigate domain bias. Enhanced cross-scene generalization and enables fast cross-environment model deployment.
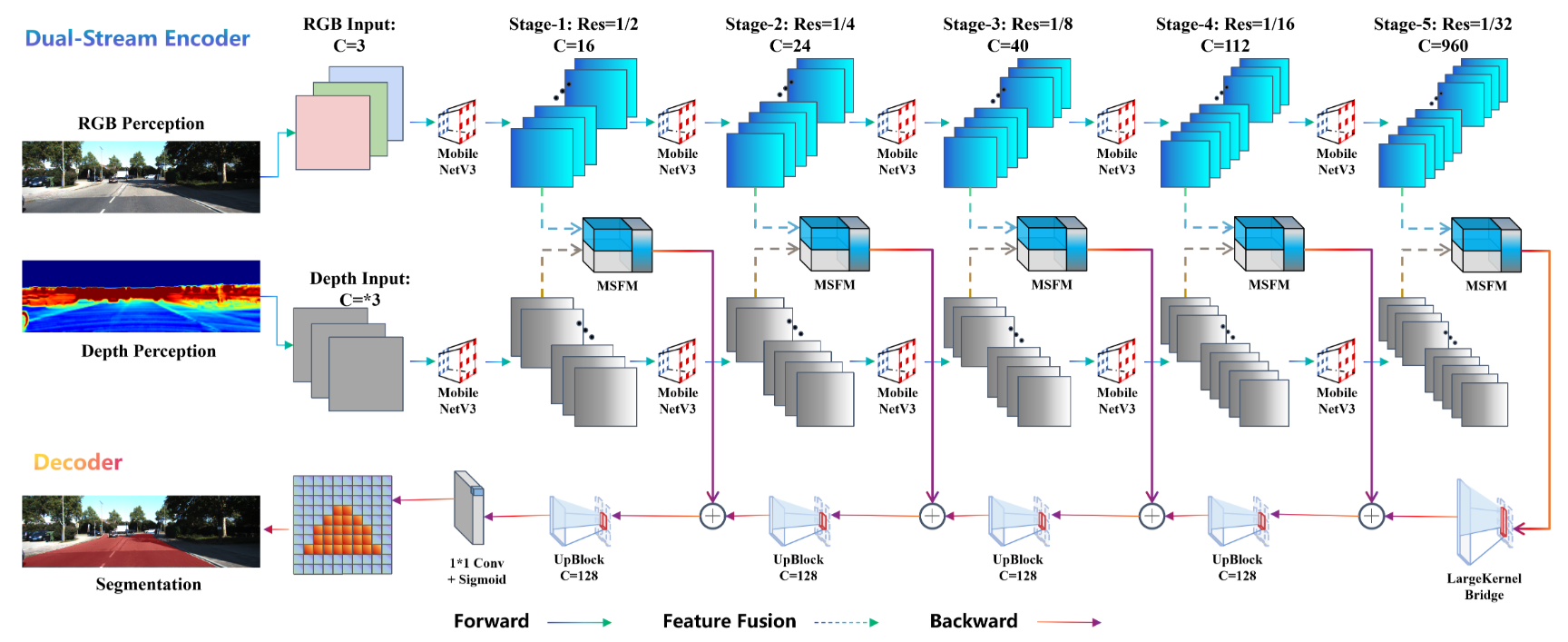
RAL 2026 UR | First Author | arXiv
LiteViLNet: Lightweight Vision-LiDAR Fusion Network
Developed ultra-lightweight vision-LiDAR fusion network for road segmentation. Optimized model parameters and inference speed, suitable for low-power edge devices in autonomous driving and intelligent vehicle perception systems.
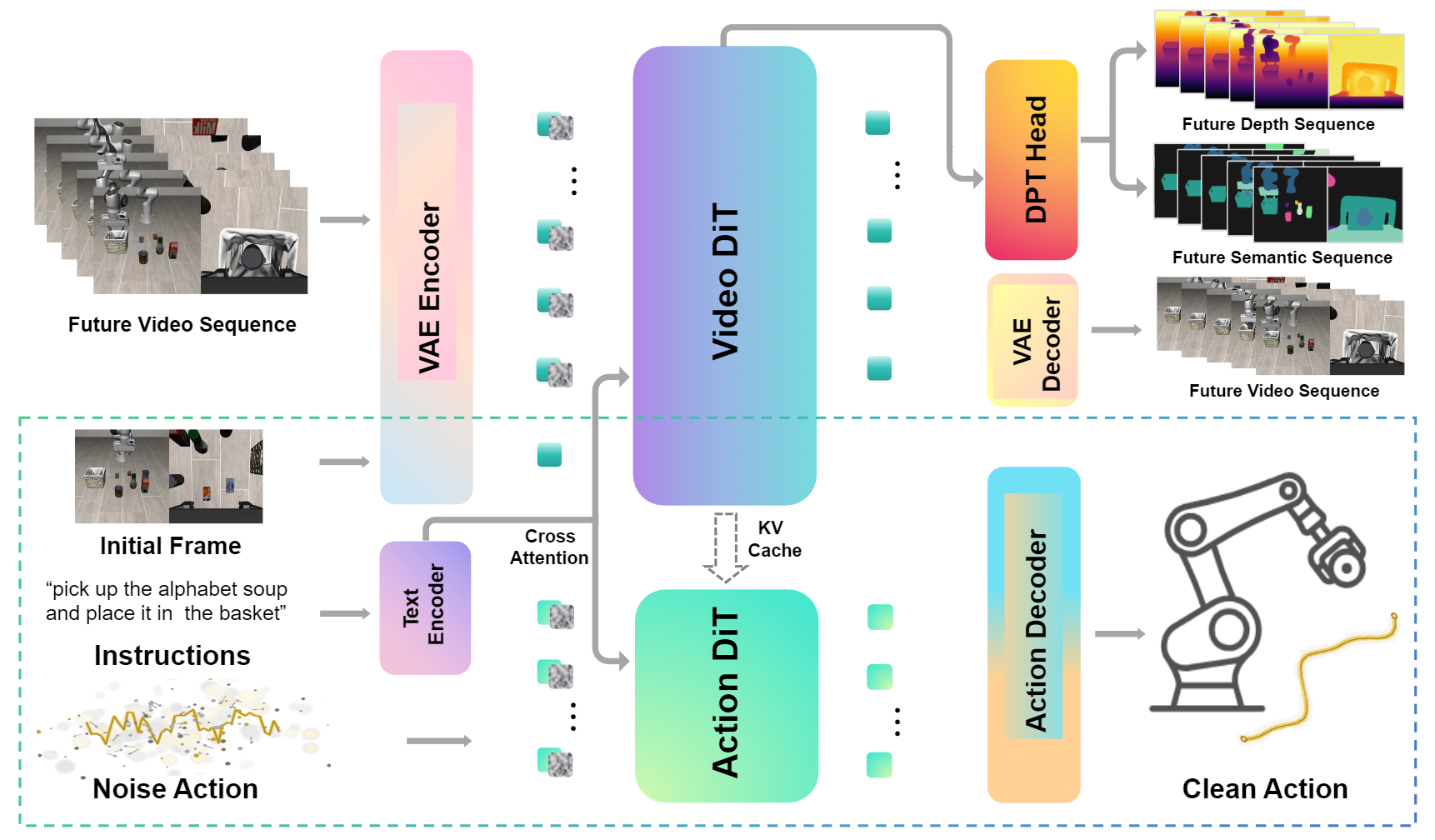
CoRL 2026 UR | Co-First Author | arXiv
GeoSem-WAM: Geometry- and Semantic-Aware World Action Models
Proposed a geometry- and semantic-aware world action model for embodied agents. Enhanced the model's ability to understand and interact with complex environments by integrating geometric and semantic information.
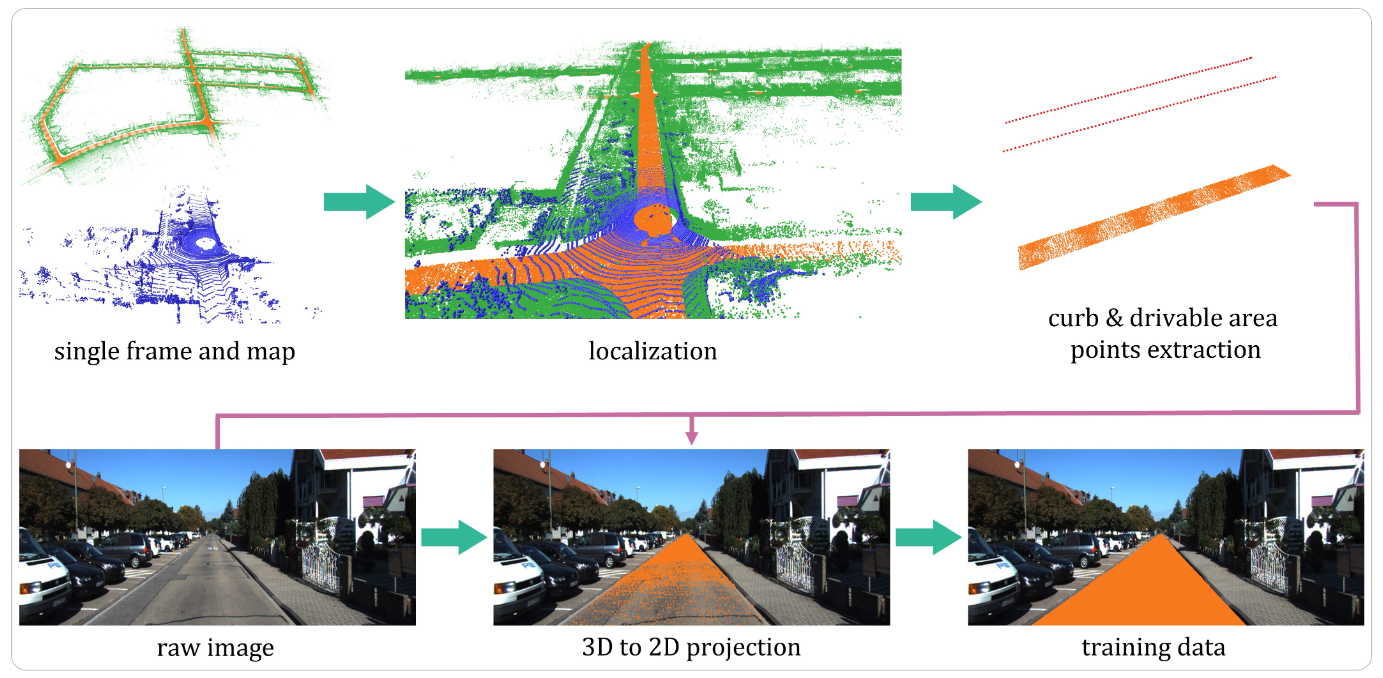
RAL 2026 UR | Co-First Author | arXiv
Annotation-Free Drivable Area and Curbs Detection
Proposed an annotation-free perception method based on LiDAR map prior. Eliminated reliance on manual labeling, reduced industrial deployment cost, and improved adaptability for autonomous driving roadside perception.
🤝 Industrial Cooperation Projects

2025 – Present | Project Lead | Million-level Industry Project with Huawei
Edge-Cloud Collaborative VLA Control Architecture for Embodied Robots
Led full-stack development for Huawei-sponsored project. Completed spatial semantic topological map construction, LLM-driven NL-based robot navigation, and edge-cloud collaborative large-model deployment on real legged robots.
📜 Patents
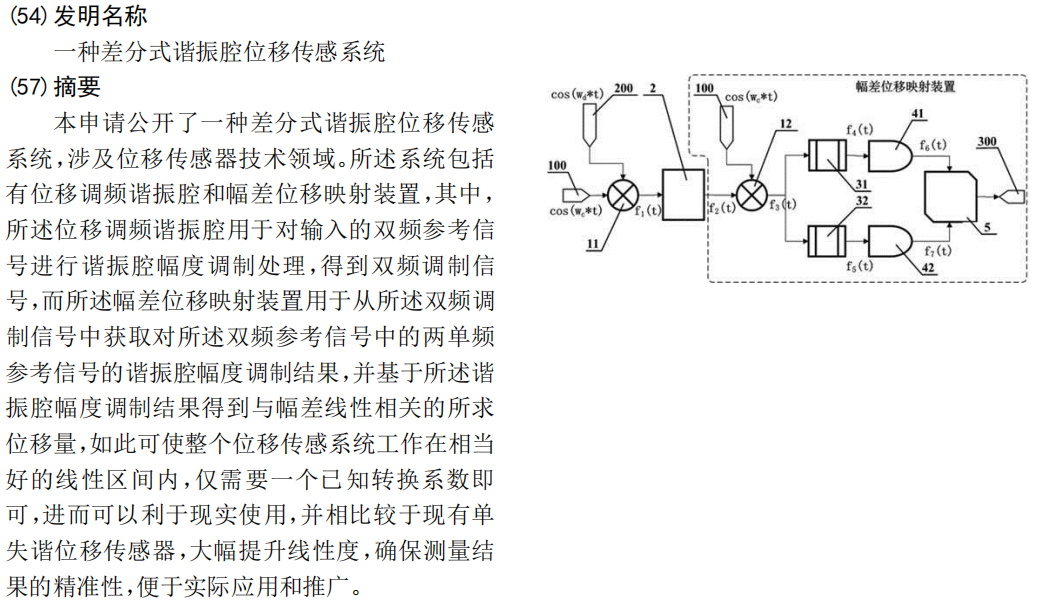
Differential Resonant Cavity Displacement Sensing System | CN115824026A (Invention, 1st Inventor) | Full PDF
Designed a high-precision differential resonant cavity displacement sensor, significantly improving linearity and stability. Widely applicable to precision sensing, quantum experiments, and robotic micro-displacement detection.
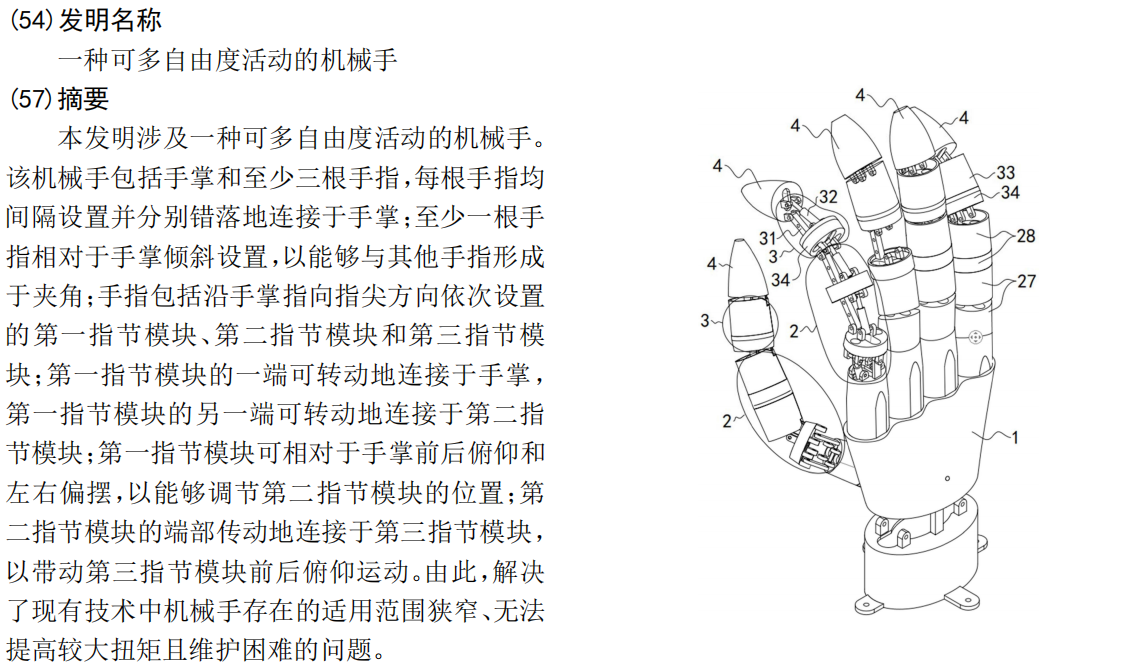
Multi-Degree-of-Freedom Robotic Manipulator | CN116214555A (Invention, 1st Inventor) | Full PDF
Proposed a multi-DOF flexible manipulator structure design, solving the problems of limited working range and low torque of traditional manipulators. Suitable for industrial grasping and service robot scenarios.
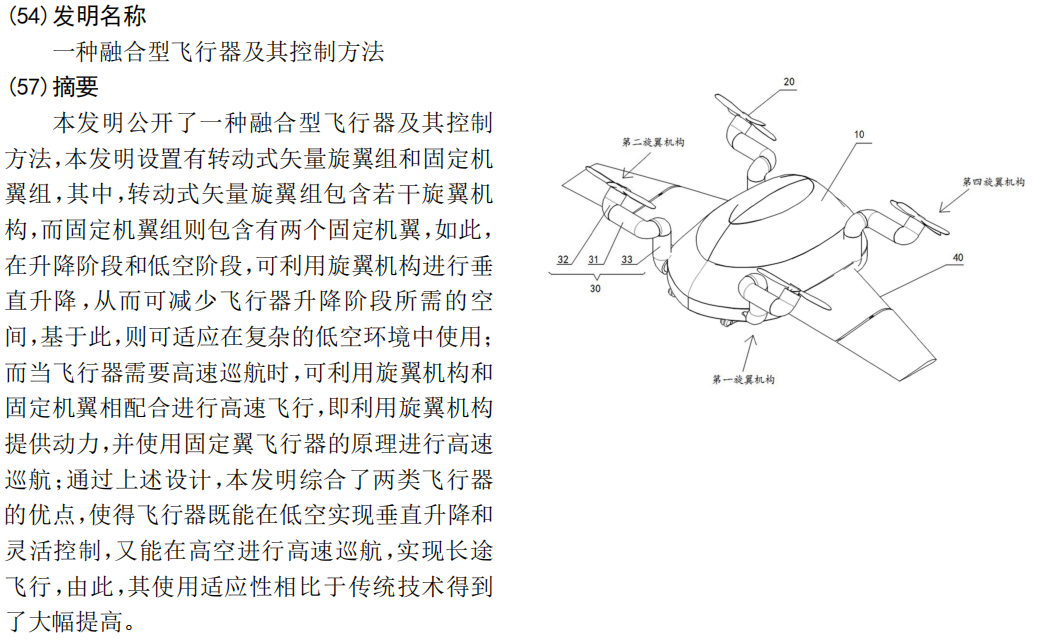
Hybrid Aircraft and Its Control Method | CN116834949A (Invention, 1st Inventor) | Full PDF
Integrated vertical take-off and high-speed cruise capabilities, realizing hybrid flight mode switching. Applicable to inspection, mapping and special unmanned aerial vehicle tasks.
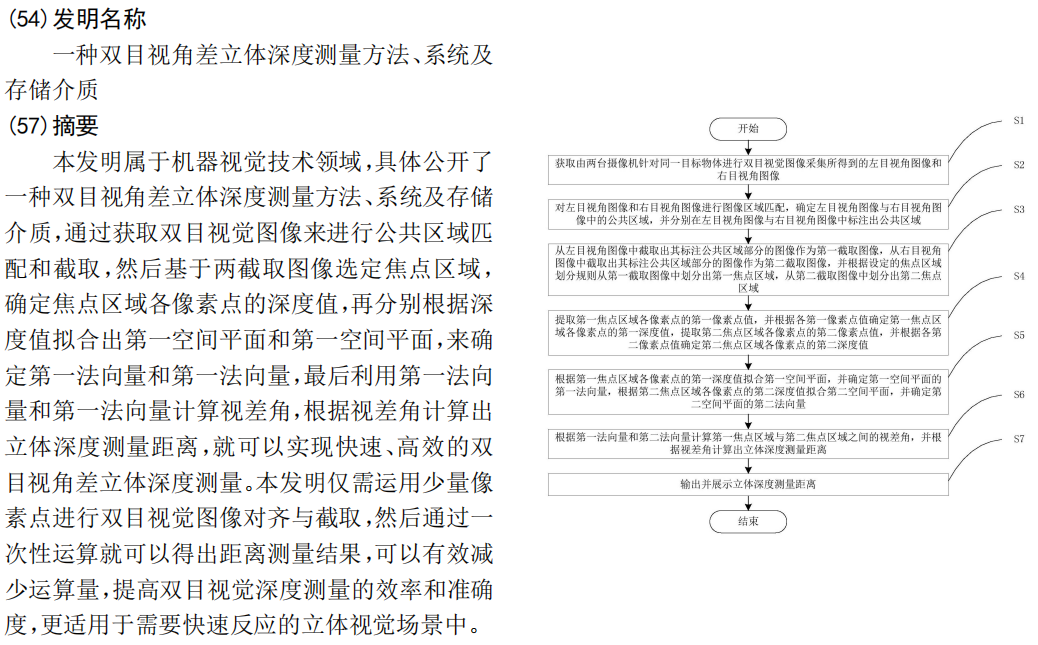
Binocular Disparity-based Stereo Depth Measurement System | CN116929290A (Invention, 1st Inventor) | Full PDF
Optimized binocular depth calculation algorithm, reduced computational complexity, and improved real-time performance. Suitable for robot vision and automatic driving 3D perception.
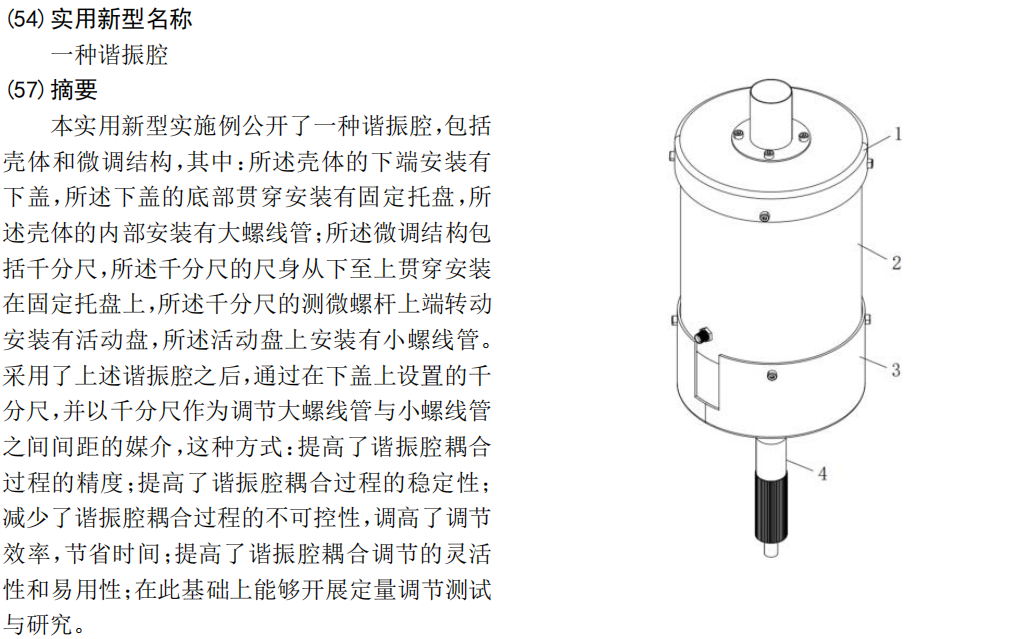
Resonant Cavity | CN218498352U (Utility Model, 1st Inventor) | Full PDF
Optimized resonant cavity structural design, improving electromagnetic field stability and mechanical assembly accuracy for quantum physics and sensing system equipment.
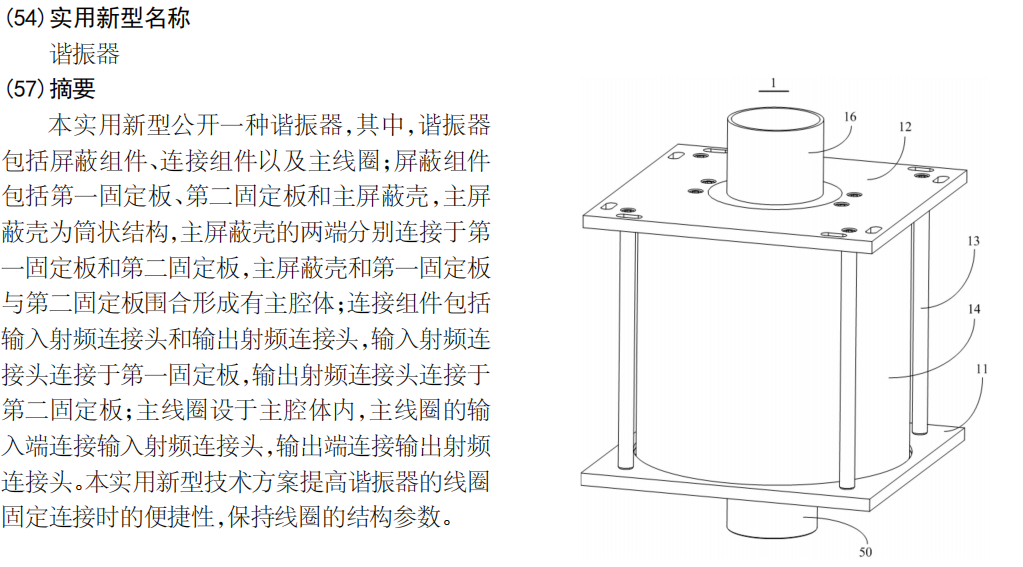
Resonator | CN220253443U (Utility Model, 2nd Inventor) | Full PDF
Novel resonator structure design, reducing energy loss and improving frequency stability, applied to resonant sensing and quantum control systems.
🏆 Honors & Awards
2024 HKUST(GZ) Full Scholarship for Postgraduate Studies (University)
2023 National Postgraduate Scholarship (National)
2021 18th Huawei Cup National Graduate Mathematical Modeling Competition, Third Prize (National)
2020 Shandong Provincial Science & Technology Competition Third Prize (Provincial)
2019 Shandong Electronic Design Competition Third Prize (Provincial)
2019 100m Freestyle Swimming, Third Prize (University)
🙂 Self-Evaluation
Self-motivated, rigorous and detail-oriented, with solid theoretical and engineering background
in robotics, embodied intelligence and embedded system. Keen on academic innovation and
practical implementation, good at communication and teamwork.